

A robot created by NASA’s Jet Propulsion Laboratory may be able to slide inside cracks on Saturn’s icy moon Enceladus. The robot has a flexible body that allows it to adapt to the environment it encounters, unlike the rovers that have been launched to the moon and Mars, which have metallic wheels. A four-meter-long mechanical snake made by NASA called the EELS (Exobiology Extant Life Surveyor) project contains ten similar segments and ten spinning screws that grab the ground, propel it forward, and self-screw through the ice.

Abandoning Wheels for Snakes
Wheels have restrictions, even if they can travel through sand and dunes. For instance, if a hill is too steep, the wheels can swerve and the car might topple. Because it’s simple to become stranded in snow and ice, the Mars rover’s operators likewise avoided it. In order to overcome these limits, the EELS project mimics snakes, which are skilled at navigating across challenging terrain. It can move from side to side and even lift its head like a snake because to the joints between its segments.
Testing the Robot
In 2019, NASA engineers started constructing the first EELS prototype. A ski resort’s snow, an ice rink, and even a hole in British Columbia’s Athabasca Glacier have all been used for testing the robot. Its sensor head was dropped into the hole to map the area using lidar and stereo cameras.

Potential Target: Saturn’s Moon Enceladus
Enceladus, a moon of Saturn with geysers erupting water from breaches near its south pole, is an ice world with slithery snakes as good candidates for exploration. The surface of Enceladus resembles walking through a glacier on Earth because it has deep craters that could easily swallow a wheeled vehicle. EELS can adapt to challenging terrain thanks to its flexibility, skin-like force-sensing actuators, and self-navigation features.

Exobiology Extant Life Surveyor, or EELS, is a NASA project that consists of a four-meter-long mechanical snake with 10 identical segments, each enclosed in a shell that resembles a helical screw. The rotating screws will be able to self-screw through ice, grab the ground, and advance it. Although its sensor head really incorporates cameras and object-detecting lidar, it can slither from side to side and even lift its head like a snake sniffing the air thanks to the joints between its parts.
The first EELS prototype was constructed by engineers in 2019, and they have plenty of time to refine their robot. Even the conceptual plan for NASA’s future exploration of Enceladus does not see a mission departing before 2038.
Heading to Enceladus
NASA’s future exploration of Enceladus is only at the concept stage, and even that plan doesn’t imagine a mission leaving before 2038. But when it does, the snake robot will carry an array of sensors to examine the chemistry of the ice and possibly search for any signs of life.

With its skin-like force-sensing actuators and elasticity, they anticipate that it will be better able to adapt to challenging terrain.
Saturn’s moon Enceladus, an ice world with geysers pouring water out of fractures near its south pole, suggests a subsurface ocean and could be a habitat for extraterrestrial life, is a top target for EELS.
Nature-Inspired Robotics
The snake robot will be able to navigate totally on its own because Enceladus is almost a billion and a half kilometers from Earth and a radio signal must travel there for more than an hour. That includes climbing out of a hole or crack if it falls into one.
It will be equipped with a variety of yet-to-be-chosen sensors that will probably analyze the chemistry of the ice and perhaps search for any evidence of life.
Nature provides many other ways to allow animals mobility in a range of places where wheels cannot travel, despite the fact that humans invented the wheel.
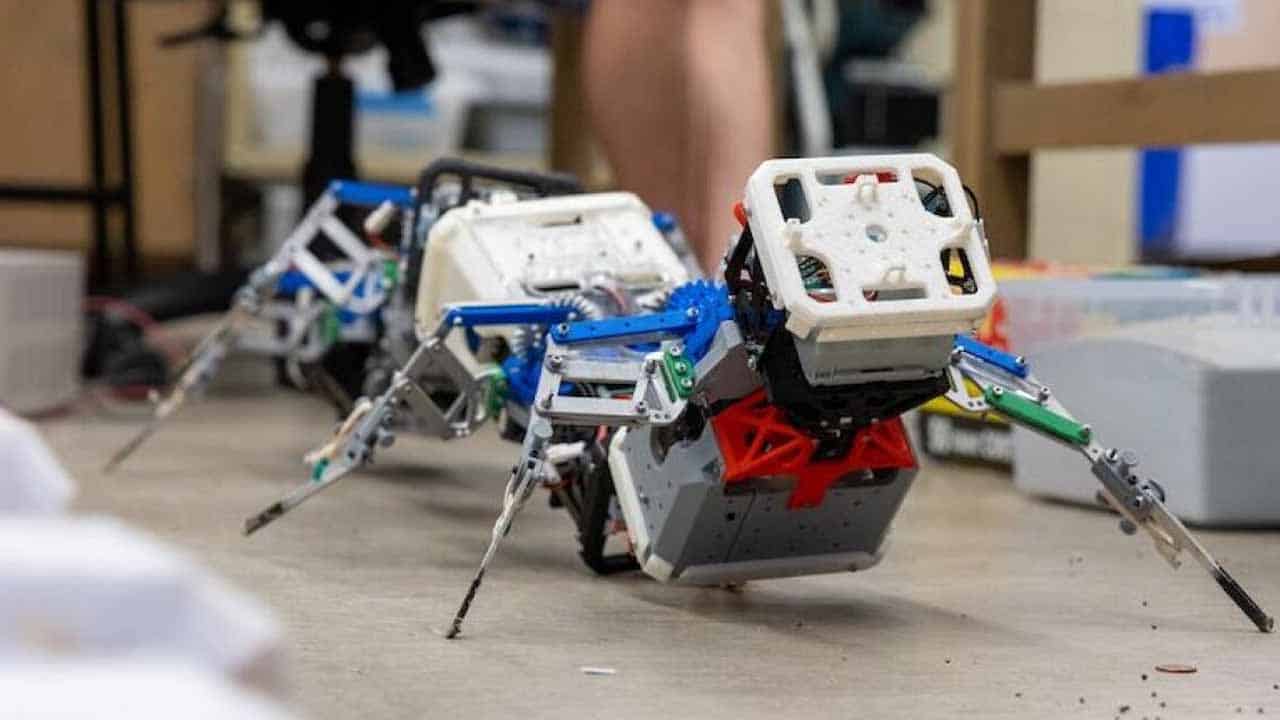
Another Georgia Tech team is using centipedes as inspiration to build multi-legged robots that can climb across uneven ground. Taking lessons from nature seems like a smart idea as we use our mechanical creatures to reach out to distant worlds.





{kind=link}